

通用化的ROS移动机器人平台,该底盘采用麦克纳姆轮全向底盘,是面向广大企业、院校及科研机构开发的全开源无人驾驶机(ROS)平台,广泛用于企业前期开发验证、院校教学、实验、大赛及科研等应用,高度集成硬件驱动模块,分布式结构化软件设计框架,可实现地图构建、自主导航、机器学习、无人驾驶验证等功能。
特点:
稳固车身:金属底盘、内置摆臂悬挂,ABS外壳;
电源保护:6800maH超大动力电池,待机时间超5H,内置电源保护+电能检测;
人机交互:配置5寸电容屏触控交互,支持多点触控;
开放开源:配置ROS开放式架构,开源ROS代码,配套课程资源包;
模块组合:支持四轴、六轴、双目、输送带、机械爪多种配件安装,支持个性化配置;
结合机器人系统,能够搭建复合型六轴、四轴机器人的抓取、视觉搬运、物流自动化以及上下料自动化搬运,结合SLAM激光以及机器人末端视觉能够实现复合机器人在组成机构上与室内复合机器人类似,即由移动底盘+协作机械臂+执行末端+各类传感器组成,是一种集移动、环境感知、抓取等功能于一体的复合型机器人。
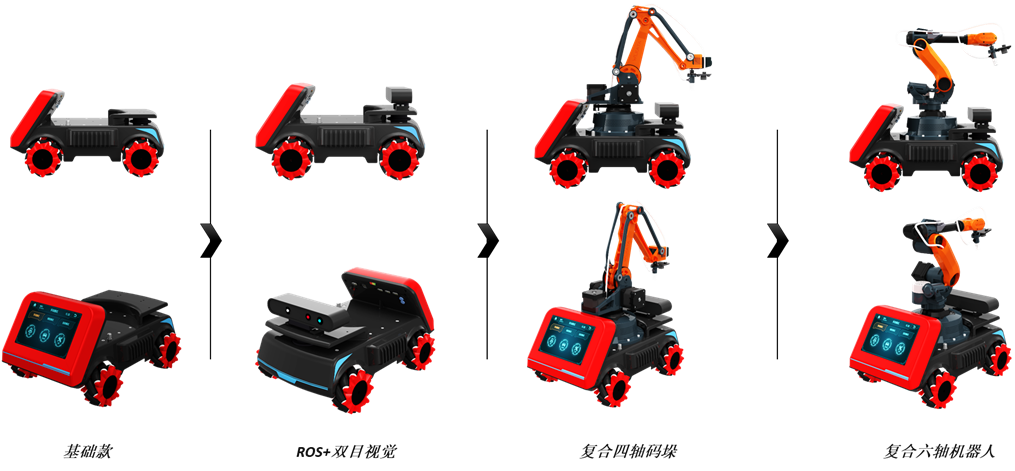
机器人作为复合型智能ROS开发底盘,配置了丰富的无线、有线通讯的扩展接口,并结合车载结构,能够灵活安装各类机械手和扩展模块,主要分为四个版本:
基础款:四轮麦克纳姆轮底盘;
ROS双目型:底盘+配置双目视觉功能;
复合四轴码垛:复合底盘 + 四轴码垛+ 单目视觉 + 选配双目视觉+码垛货盘;
复合六轴机器人:复合底盘 + 六轴轴机器人 + 单目视觉+选配双目视觉+码垛货盘;
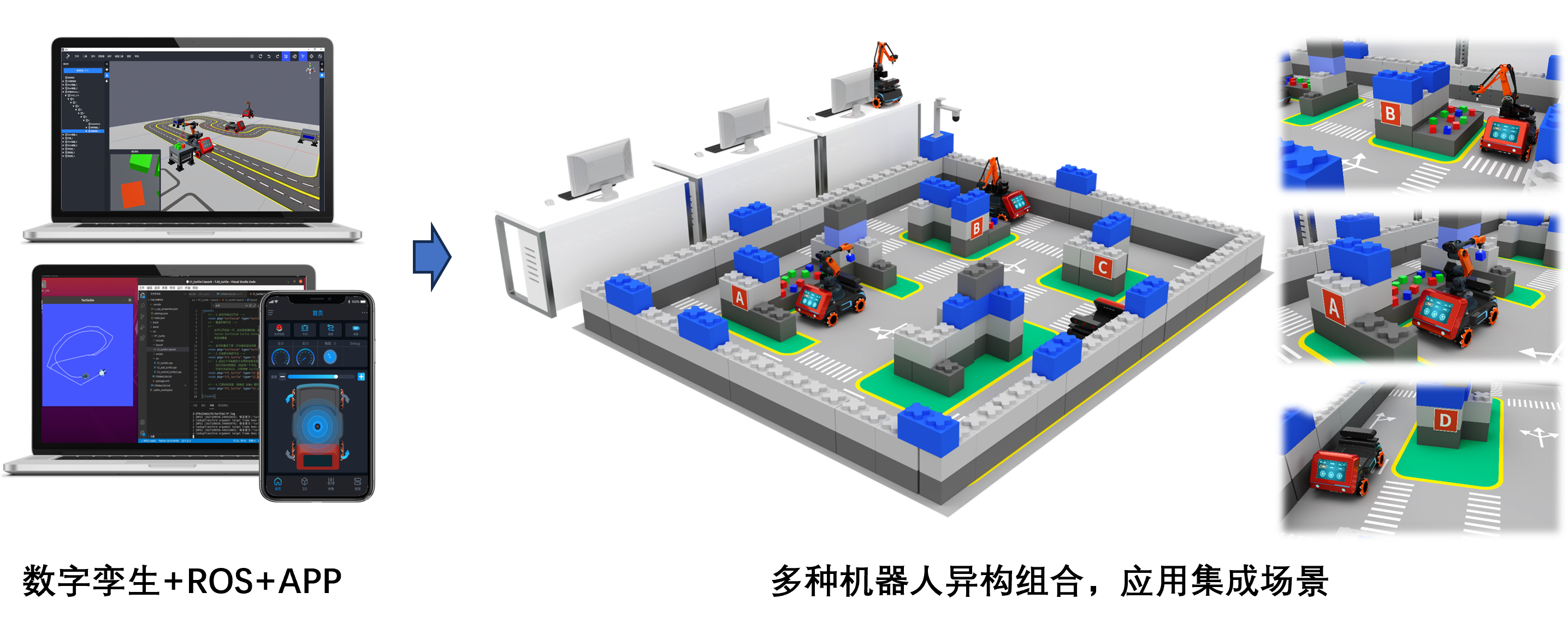
基于ROS机器人、人工智能应用集成以及物流工厂的应用,配套了三维数字孪生仿真系统,低代码编程平台以及APP手机端调试系统,能够搭建围绕机器人导航、搬运、自动化集成的实训工作站,能够结合管理、编程和仿真平台实现对智能机器人沙盘工厂的实训应用平台;
模块化:整个实训平台由积木式的EVA材质模块搭建,安全高效,可自由搭建;
虚拟仿真:配套IOA-ROS虚拟仿真软件包,可通过仿真软件指导和仿真搭建;
丰富内容:ROS机器人系统包含了基础物流车、复合码垛机器人、复合六轴机器人三种系统,结合多种耗材,可实现ROS移动机器人 + 机械臂的多种场景应用实验;
系统化:平台配置视觉标签、导航贴图、视觉耗材模块,并安装有二自由度云台监控摄像,可实现多组学生对战和综合仿真实训应用;


 登录账户的好处
登录账户的好处
