
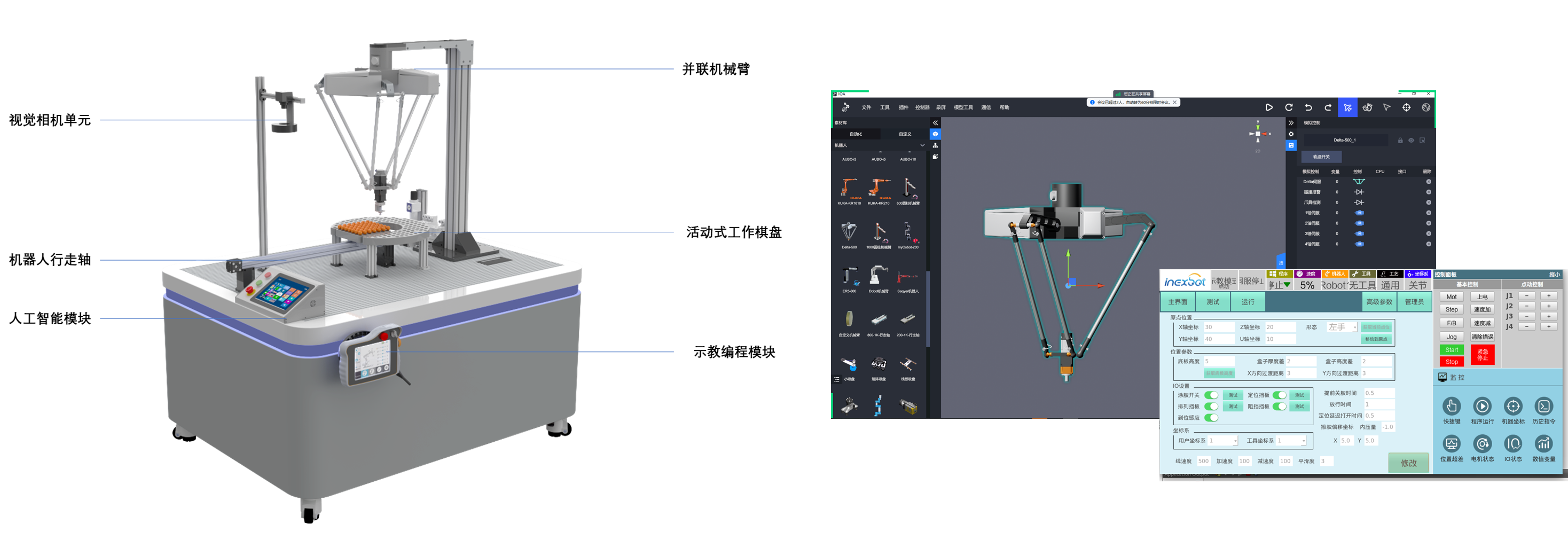
高速Delta机器人视觉工作站由四自由度并联工业机器人,智能视觉系统,编程学习板,Linux控制系统以及一套实训工作台,供料机构、输送流水线机构、检测机构可实现对高速传输的工件进行分拣、检测、搬运、装配、存储等操作。实训站配套机器人编程软件、PLC编程软件,教学仿真软件可进行仿真学习与程序编写。
实训台采用工业标准件设计,各组件均安装在高强度铝合金型材桌面上,机械结构,电气控制,执行机构相对独立。通过此平台可进行并联关节机器人结构、运动轨迹、算法分析与设计、控制原理、机器人视觉原理、PLC控制原理与编程、以及系统之间的通讯、检测、交互控制理论、机器人编程与调试、I/O通讯、程序数据、PLC程序编写、硬件连接、视党系统调试、通讯方式设定等多方面操作学习,适合高等院校机器人基础实训操作和二次开发和深度学习。
1)直观性较强:主要设备均采用高强度铝合金 + “豪华型”实训台,结构简单,便于学生拆装。
2)系统性强,贴近实际生产:该实训平台将目前两台典型的高速机器人(3+1轴)和机器人视觉系统有机结合,同时集成传感器、气动元器件等知识,使学生对机电一体化设备有了更直观的认识。该平台模拟了机器人实际应用,缩短学生从教室到工业现场的过度和适应时间。
3) 开放性和扩展性强:该平台还可根据自己的教学需要快捷地更换主要设备,通过现场总线实现多种设备的挂接。
4) 安全性高:该实训平台配备相应的漏电、过载及短路保护,能够确保操作者的人身安全。
5) 虚实结合,数字孪生:配套1:1的数字孪生IOA平台,能够实现结合实体机器人的虚拟仿真、虚实仿真的二次开发及实训内容扩展;
1.输送模块:采用高精密步进电机轨道,配套总线驱动模块组成轨道式送料单元。
2.四自由度并联工业机器人:本工作站采用的数字孪生四自由度并联工业机器人为ZY-D500高速并联机器人,臂展范围500mm,精度0.05mm。
3.机器人末端执行器:本工作站的机器人末端执行器即为吸盘。末端执行器安装于机器人末端安装法兰面上,用于随机器人对物料进行高速高精度的分拣。
4.视觉系统:本工作站的视觉系统采用高清机器视觉系统,配套Linux开放式控制系统,具有颜色、形状、OCR文字、二维码以及神经网络训练视觉功能。通过视觉系统对物料的位姿进行检测,将信号传送给控制系统,控制系统通过计算分析后指令机器人对物料进行分拣。
5.机器人工作台:本工作站中并联机器人、输送带、视觉系统等其他辅助模块均集成于工作台上,布局合理、美观,使用方便。
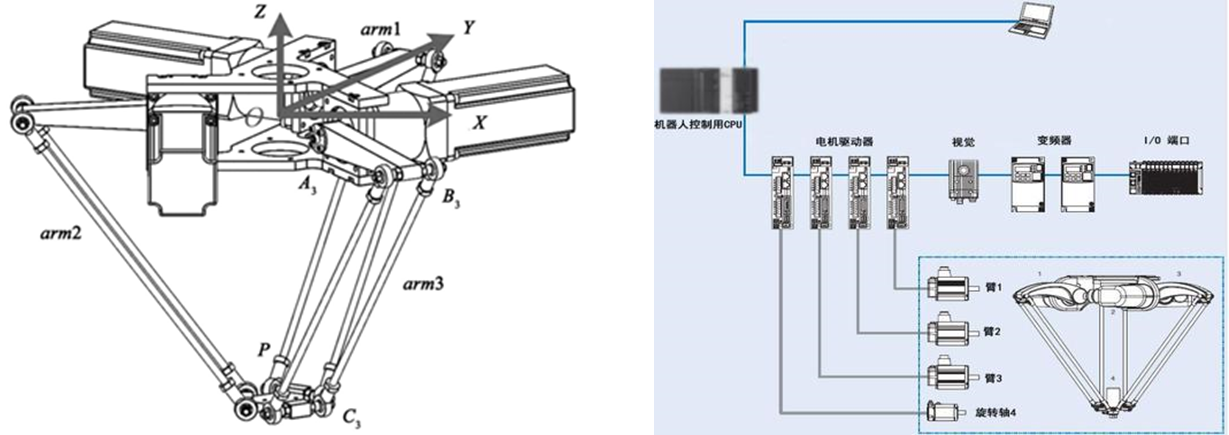
1、并联机器人的机构组成、工作原理、性能指标认识;
2、并联机器人机械系统的组成;
3、并联机器人正逆运动学分析;
4、并联机器人控制系统的学习;
5、机器视觉训练及应用的学习与应用;
7、现场总线的应用;
8、机器人示教编程与再现控制原理与方法;
9、机器人PTP运动轨迹控制方法;
10、机器人视觉系统的认识及操作;
11、机器人的视觉分拣实验


 登录账户的好处
登录账户的好处
