

桌面型六轴机器人系统,采用典型的工业机器人的串联结构,1:1等比例缩小,机器人每个关节均采用高精密减速步进电机驱动,配套linux机器人运动控制系统,数字孪生3D仿真系统以及ROS机器人开发课程;
基于机器人的linux运动及控制系统,具有完整的机器人运动学、正逆运算、加减速优化等,能够实现搬运、码垛、雕刻、组装等多种机器人自动化应用的任务。
1.机器人类型:六轴串联型工业机器人
2.机器人负载:420g;
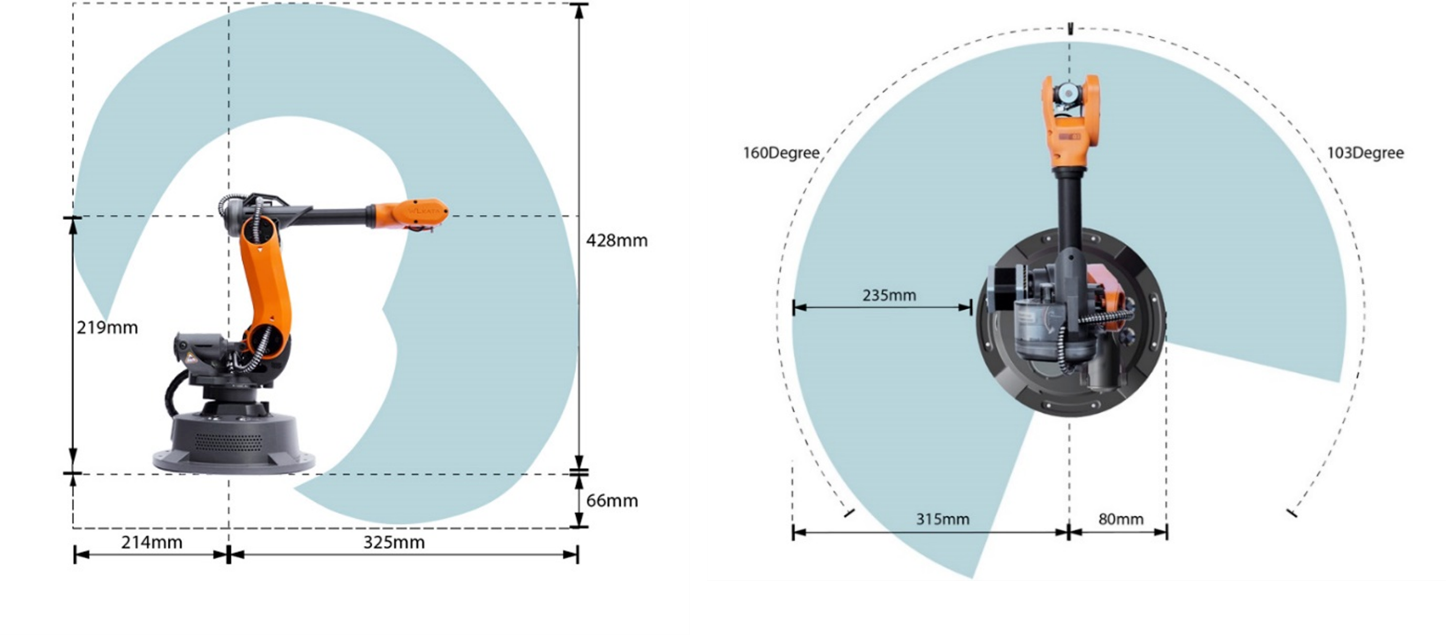
3.机器人臂展:315mm;
4.定位精度:0.5mm;
5.材质:铝合金 + ABS塑料;
6.驱动:步进电机+高精密减速六轴驱动;
7.轴运动参数:
(1)、轴1 :范围100° to +100°,速度31° / s
(2)、轴2 :范围60° to +90°,速度65° / s
(3)、轴3 :范围180° to +50°,速度28° / s
(4)、轴4 :范围180° to +180°,速度 110° / s
(5)、轴5 :范围180° to +40°,速度33° / s
(6)、轴6 :范围180° to +180° ,速度66° / s
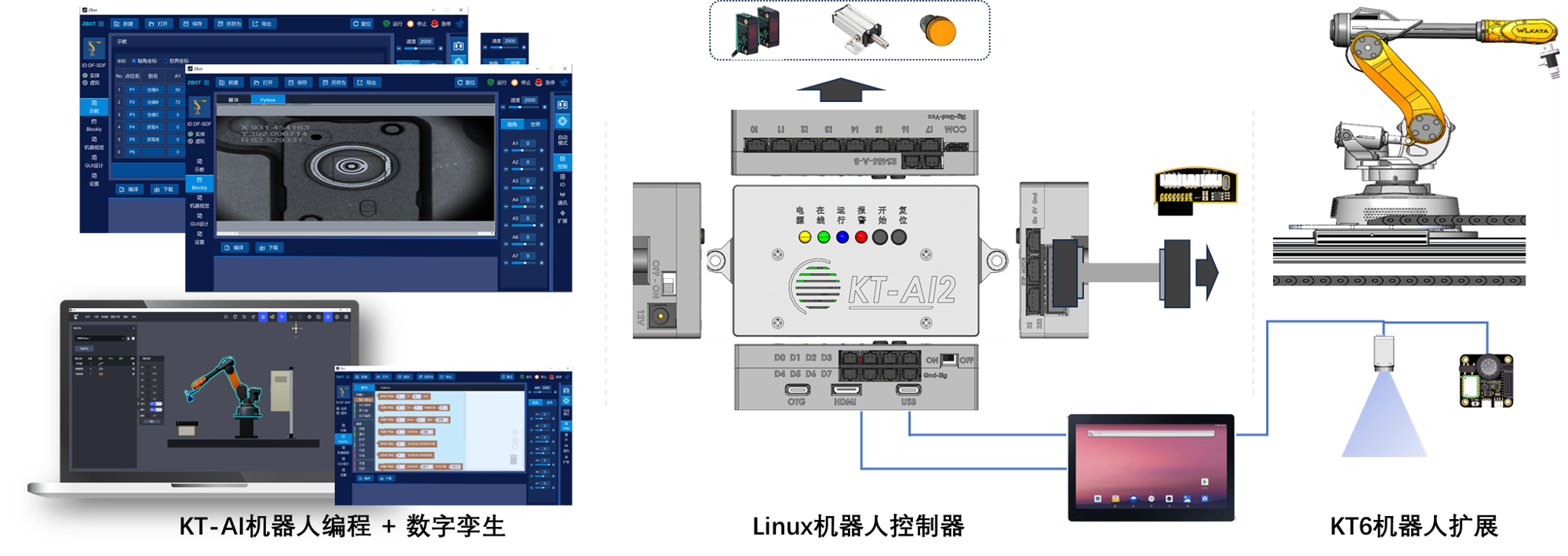
机器人配置linux系统的KT-AI核心控制器,结合USB、网口、RS232工业总线串口,WIFI接口等,可配置多种组合的硬件模块,实现机器人的多种应用编程与组合。
高性能linux控制器,卡片式电脑,四核处理器,内存4G,集成WIFI、千兆网、USB、IO、机器人第七轴、电机驱动、机器视觉、HDMI触控液晶以及扩展RS485控制系统,支持ROS系统开发;
图形化机器人编程:图形化 + Python编程,集成机器人示教、IO、通讯、UI设计、机器视觉编程等综合一体化编程平台;
数字孪生仿真:结合机器人,可实现1:1的虚拟机器人编程、虚实仿真,综合集成调试等应用;


 登录账户的好处
登录账户的好处
